一. 声明
本专栏文章我们会以连载的方式持续更新,本专栏计划更新内容如下:
第一篇:蓝牙综合介绍 ,主要介绍蓝牙的一些概念,产生背景,发展轨迹,市面蓝牙介绍,以及蓝牙开发板介绍。
第二篇:Transport层介绍,主要介绍蓝牙协议栈跟蓝牙芯片之前的硬件传输协议,比如基于UART的H4,H5,BCSP,基于USB的H2等
第三篇:传统蓝牙controller介绍,主要介绍传统蓝牙芯片的介绍,包括射频层(RF),基带层(baseband),链路管理层(LMP)等
第四篇:传统蓝牙host介绍,主要介绍传统蓝牙的协议栈,比如HCI,L2CAP,SDP,RFCOMM,HFP,SPP,HID,AVDTP,AVCTP,A2DP,AVRCP,OBEX,PBAP,MAP等等一系列的协议吧。
第五篇:低功耗蓝牙controller介绍,主要介绍低功耗蓝牙芯片,包括物理层(PHY),链路层(LL)
第六篇:低功耗蓝牙host介绍,低功耗蓝牙协议栈的介绍,包括HCI,L2CAP,ATT,GATT,SM等
第七篇:蓝牙芯片介绍,主要介绍一些蓝牙芯片的初始化流程,基于HCI vendor command的扩展
第八篇:附录,主要介绍以上常用名词的介绍以及一些特殊流程的介绍等。
另外,开发板如下所示,对于想学习蓝牙协议栈的最好人手一套。以便更好的学习蓝牙协议栈,相信我,学完这一套视频你将拥有修改任何协议栈的能力(比如Linux下的bluez,Android下的bluedroid)。
------------------------------------------------------------------------------------------------------------------------------------------
CSDN学院链接(进入选择你想要学习的课程):undefined
蓝牙交流扣扣群:970324688
Github代码:undefined
入手开发板:undefined
------------------------------------------------------------------------------------------------------------------------------------------
二. 前言
首先在介绍以下内容之前,我们先来介绍下我们的CSDN课程,以下介绍内容都会在 CSDN课程 手把手教你蓝牙协议栈入门(点击我)中第二小节介绍。
三. Transport H4介绍
1. 概念介绍
整个Transport在蓝牙架构中的位置如下图红框位置:
蓝牙Transport就是蓝牙的硬件发送协议,硬件的传输介质有:UART/USB/SDIO,那么Transport就是在特定的硬件传输介质上增加了一些协议,比如我们本节将的H4就是在UART上增加了一个小协议,H4算是最简单的一个协议,只是在数据前面加一个Type,了解过蓝牙HCI的一般都会知道蓝牙协议栈(Host)跟芯片(Controller)一般是通过HCI数据来沟通,那么H4就是在HCI数据前面加上一个TYPE。...
一. 声明
本专栏文章我们会以连载的方式持续更新,本专栏计划更新内容如下:
第一篇:蓝牙综合介绍 ,主要介绍蓝牙的一些概念,产生背景,发展轨迹,市面蓝牙介绍,以及蓝牙开发板介绍。
第二篇:Transport层介绍,主要介绍蓝牙协议栈跟蓝牙芯片之前的硬件传输协议,比如基于UART的H4,H5,BCSP,基于USB的H2等
第三篇:传统蓝牙controller介绍,主要介绍传统蓝牙芯片的介绍,包括射频层(RF),基带层(baseband),链路管理层(LMP)等
第四篇:传统蓝牙host介绍,主要介绍传统蓝牙的协议栈,比如HCI,L2CAP,SDP,RFCOMM,HFP,SPP,HID,AVDTP,AVCTP,A2DP,AVRCP,OBEX,PBAP,MAP等等一系列的协议吧。
第五篇:低功耗蓝牙controller介绍,主要介绍低功耗蓝牙芯片,包括物理层(PHY),链路层(LL)
第六篇:低功耗蓝牙host介绍,低功耗蓝牙协议栈的介绍,包括HCI,L2CAP,ATT,GATT,SM等
第七篇:蓝牙芯片介绍,主要介绍一些蓝牙芯片的初始化流程,基于HCI vendor command的扩展
第八篇:附录,主要介绍以上常用名词的介绍以及一些特殊流程的介绍等。
另外,开发板如下所示,对于想学习蓝牙协议栈的最好人手一套。以便更好的学习蓝牙协议栈,相信我,学完这一套视频你将拥有修改任何协议栈的能力(比如Linux下的bluez,Android下的bluedroid)。

------------------------------------------------------------------------------------------------------------------------------------------
CSDN学院链接(进入选择你想要学习的课程):undefined
蓝牙交流扣扣群:970324688
Github代码:undefined
入手开发板:undefined
------------------------------------------------------------------------------------------------------------------------------------------
二. 前言
首先在介绍以下内容之前,我们先来介绍下我们的CSDN课程,以下介绍内容都会在 CSDN课程 手把手教你蓝牙协议栈入门(点击我)中第二小节介绍。
三. Transport H4介绍
1. 概念介绍
整个Transport在蓝牙架构中的位置如下图红框位置:

蓝牙Transport就是蓝牙的硬件发送协议,硬件的传输介质有:UART/USB/SDIO,那么Transport就是在特定的硬件传输介质上增加了一些协议,比如我们本节将的H4就是在UART上增加了一个小协议,H4算是最简单的一个协议,只是在数据前面加一个Type,了解过蓝牙HCI的一般都会知道蓝牙协议栈(Host)跟芯片(Controller)一般是通过HCI数据来沟通,那么H4就是在HCI数据前面加上一个TYPE。一共有5中type,如下:
1)HCI COMMAND:由蓝牙协议栈发送给芯片的命令
2)HCI EVENT:由蓝牙芯片上报给蓝牙协议栈的事件
3)HCI ACL:蓝牙协议栈跟蓝牙芯片双向交互的普通数据
4)HCI SCO:蓝牙芯片跟蓝牙协议栈双向交互的通话/语音识别等音频数据
5)HCI ISO(这部分是在core5.2才添加):用于发送LE audio
在Core文档截图如下:

交互数据格式为:

所以我们看下代码在这部分的实现:
1)通过宏配置协议栈的TRANSPORT type,可以看到以下代码是配置的H4
/** BT_PBUF_TRANSPORT_H2 = 0x01,BT_PBUF_TRANSPORT_H4 = 0x02,BT_PBUF_TRANSPORT_H5 = 0x03,BT_PBUF_TRANSPORT_BCSP = 0x04,*/
#define BT_TRANSPORT_TYPE 0x02
-
2)举例说明HCI reset发送(HCI raw data为0x03 0x0c 0x00)
err_t hci_reset(void)
{
struct bt_pbuf_t *p;
/* 申请Transport的buffer,比HCI数据多了一个byte */
if((p = bt_pbuf_alloc(BT_TRANSPORT_TYPE, HCI_RESET_PLEN, BT_PBUF_RAM)) == NULL)
{
BT_HCI_TRACE_ERROR("ERROR:file[%s],function[%s],line[%d] bt_pbuf_alloc fail\n",__FILE__,__FUNCTION__,__LINE__);
return BT_ERR_MEM;
}
/* Assembling command packet */
p = hci_cmd_ass(p, HCI_RESET, HCI_HOST_C_N_BB, HCI_RESET_PLEN);
pcb->timer = utimer_create(HCI_RESET_TIMEOUT, hci_reset_timeout, 0);
/* Assembling cmd prameters */
/* 发送HCI raw data在底层处理增加了1个byte */
phybusif_output(p, p->tot_len,PHYBUSIF_PACKET_TYPE_CMD);
bt_pbuf_free(p);
return BT_ERR_OK;
}
3)到了Transport的处理
void phybusif_output(struct bt_pbuf_t *p, uint16_t len,uint8_t packet_type)
{
/* 后退1个byte */
bt_pbuf_header(p, 1);
/* 填写上type */
((uint8_t *)p->payload)[0] = packet_type;
uint8_t *tx_buffer = bt_get_tx_buffer();
bt_pbuf_copy_partial(p, tx_buffer, p->tot_len, 0);
BT_TRANSPORT_TRACE_DEBUG("BT TX LEN:%d\n",p->tot_len);
bt_hex_dump(tx_buffer,p->tot_len);
/* 通过UART发送出去 */
uart_bt_send(tx_buffer,p->tot_len);
}
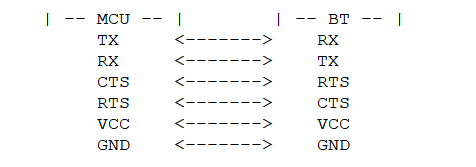
2. 硬件要求

UART硬件配置要求总结:
1)数据位8bit
2)无奇偶校验
3)停止位1bit
4)需要有硬件流控
所以MCU跟蓝牙芯片的接线需要:
我们来看下代码的实现:
1)在STM32的UART初始化(只贴出关键位置)
/******************************************************************************
* func name : hw_uart_bt_init
* para : baud_rate(IN) --> Baud rate of uart1
* return : hw_uart_bt_init result
* description : Initialization of USART2.PA0->CTS PA1->RTS PA2->TX PA3->RX
******************************************************************************/
uint8_t hw_uart_bt_init(uint32_t baud_rate,uint8_t reconfig)
{
.............
/* Data format :1:8:1, no parity check, hardware flow control */
USART_InitStructure.USART_BaudRate = baud_rate;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_RTS_CTS;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
.........
return BT_ERR_OK;
}
2)在Linux的UART初始化(只贴出关键位置)
uint8_t hw_uart_bt_init(uint32_t baud_rate,uint8_t reconfig)
{
......
// 8N1
toptions.c_cflag &= ~CSTOPB;
toptions.c_cflag |= CS8;
toptions.c_cflag |= CREAD | CLOCAL | CRTSCTS;
toptions.c_iflag &= ~(IXON | IXOFF | IXANY);
toptions.c_cflag &= ~PARENB;
toptions.c_cc[VMIN] = 1;
toptions.c_cc[VTIME] = 0;
.......
return BT_ERR_OK;
}
3. 纠错
如果主机或主机控制器在 RS232 通信上失去同步,则需要复位。失去同步意味着已检测到错误的 HCI 分组指示器,或 HCI 分组的长度域超出范围。如果在主机到主机控制器的通信中丢失 UART 同步,那么主机控制器将发送硬件故障(HCI hardware error)事件,以将同步错误告诉主机。主机控制器将需要从主机接收一个HCI_RESET 指令以执行复位。主机控制器也将在从主机到主机控制器的字节流中使用 HCI-RESET 指令,以实现重新同步。
如果在从主机控制器到主机的通信中失去 UART 同步,主机将发送 HCL_RESET指令以复位主机控制器。主机也将通过在从主机控制器到主机的字节流中查找HCI_Reset 指令的 HCL 指令完成事件,进行重新同步